Robotics scientists at TU Delft have developed a groundbreaking algorithm that allows a team of autonomous drones to collaboratively lift, navigate, and precisely position heavy, dynamically shifting payloads, even when battling windy conditions. This multi-drone system overcomes a critical limitation in current drone technology, opening the door for applications in remote construction and rescue missions where single drones lack the necessary muscle and stability.
“A single drone can only carry a very limited load,” explains Dr. Sihao Sun, a robotics researcher at TU Delft. “This makes it hard to use drones for tasks like delivering heavy building materials to remote areas, transporting large-amount of crops in mountainous regions, or assisting in rescue missions.” The need to operate in hard-to-reach places like offshore wind turbines, often under harsh weather and with unpredictable environmental contact, has pushed the boundaries of what’s possible with current drones.
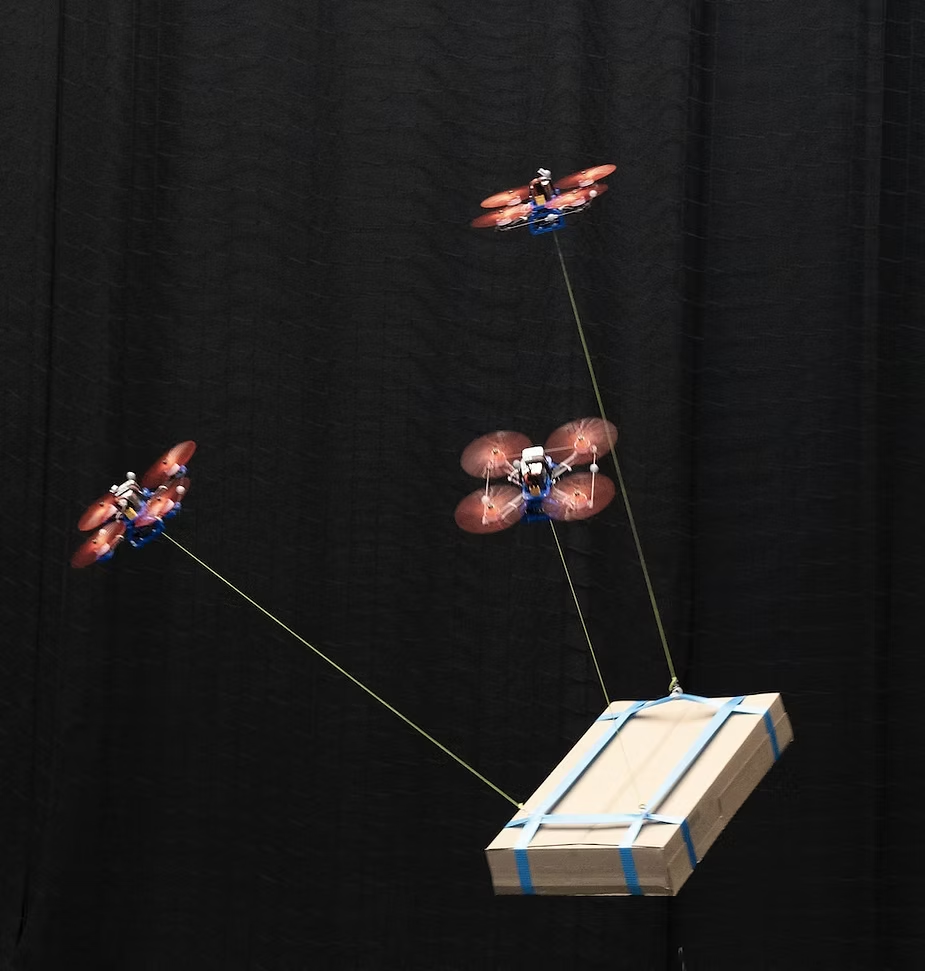
To shatter this payload ceiling, the TU Delft team designed an elegant solution: multiple drones are physically connected to a single payload via cables, creating a flying cooperative that can carry significantly heavier objects. The true innovation, however, lies in the coordination. By continuously adjusting their positions in real-time, the drones don’t just act as a collective lifting force; they can also finely control the orientation of the payload, a crucial capability for precise placement in complex environments, reported the team’s publication in Science Robotics.
READ ALSO: https://www.modernmechanics24.com/post/pla-uses-robot-dogs-drones-in-taiwan-landing-drill
“The real challenge is the coordination,” says Dr. Sun. “When drones are physically connected, they have to respond to each other and to external disturbances like sudden movements of the payload in rapid motions. Traditional control algorithms are simply too slow and rigid for that.” The new algorithm developed by the team is fast, flexible, and robust, according to the research. It can adapt to changing payload shapes and weights while actively compensating for external forces like wind, all without needing a single sensor on the payload itself—a major practical advantage for real-world deployment.
How do you rigorously test such a complex system? The team built a challenging indoor obstacle course. “We built our own quadrotors and tested them in a controlled lab environment,” Dr. Sun shares. The researchers used up to four drones simultaneously, introducing obstacles, simulating wind with a fan, and even using a moving, unpredictable payload like a basketball to test the system’s dynamic responses. The algorithm guided the drone team to pass all tests successfully.
WATCH ALSO: https://www.modernmechanics24.com/post/worlds-largest-fusion-project-iter-progress
Because the drones are fully autonomous, an operator only needs to specify the final destination. The system then handles the entire journey, navigating around obstacles and correcting for disturbances in real-time. “You just tell them where to go, and they figure out the rest,” Dr. Sun adds. This high level of autonomy is essential for missions in GPS-denied or difficult-to-navigate environments.
Currently, the system relies on external motion capture cameras for precise indoor localization, a setup that is not feasible outdoors. The TU Delft team’s next major goal is to transition this technology out of the lab and into the field, replacing the cameras with onboard sensing for complete independence. The potential applications are vast, ranging from delivering critical supplies in search and rescue operations to automating large-scale agricultural transport and assisting with construction in remote, inaccessible locations. This research paves the way for a future where teams of drones can tackle heavy-lifting tasks that are currently too dangerous or expensive for humans.
READ ALSO: https://www.modernmechanics24.com/post/toyota-electric-bz-time-attack-awd-concept-2025-sema