University of Cincinnati researchers have engineered a flapping-wing drone that autonomously hovers around a moving light source, mimicking moth behavior, using a novel extremum-seeking feedback system that requires no artificial intelligence, GPS, or complex computer models.
What if the secret to creating incredibly agile, tiny drones has been fluttering around our porch lights all along? Dr. Sameh Eisa, assistant professor at the University of Cincinnati’s College of Engineering and Applied Science, and his team are exploring this very idea by developing bio-inspired drones that replicate the flight of moths. Their breakthrough, published in the journal Physical Review E, demonstrates a drone that uses a simple, continuous feedback loop to achieve stable hovering and light-following—a task that typically demands significant computational power.
The core innovation lies in the control system. “Our simulations show that extremum-seeking control can naturally reproduce the stable hovering behavior seen in insects — without AI or complex models,” stated Ahmed Elgohary, the study’s lead author and a doctoral student in Eisa’s lab, according to the university’s report. This “model-free” approach allows the drone to make constant, tiny adjustments to its wing flapping based on real-time performance feedback. It’s programmed to optimize a single goal, like staying a specific distance from a light, and it perpetually tweaks its flight to achieve it.
This method is not only efficient but also biologically plausible, reported the University of Cincinnati. “Moths make it look easy,” Dr. Eisa said. “The reason we use extremum-seeking techniques is because they seem to be biologically plausible.” The drone’s flight might appear a bit wobbly to an observer, but this slight oscillation is intentional. Each wobble provides the necessary data for the system to evaluate its position and instantly course-correct, creating remarkably consistent and stable flight.
READ ALSO: https://www.modernmechanics24.com/post/yasa-shatters-electric-motor-record-59kwkg
The potential applications are significant, particularly for covert surveillance. The interest in flapping-wing drones, or “flappers,” stems from their high efficiency and the ability to scale them down to very small sizes. “The reason we’re interested is size. It’s a more optimal design. These small robots would have to fly like a moth,” Eisa explained. These tiny drones could operate in environments where larger, noisier quadcopters would be easily detected.
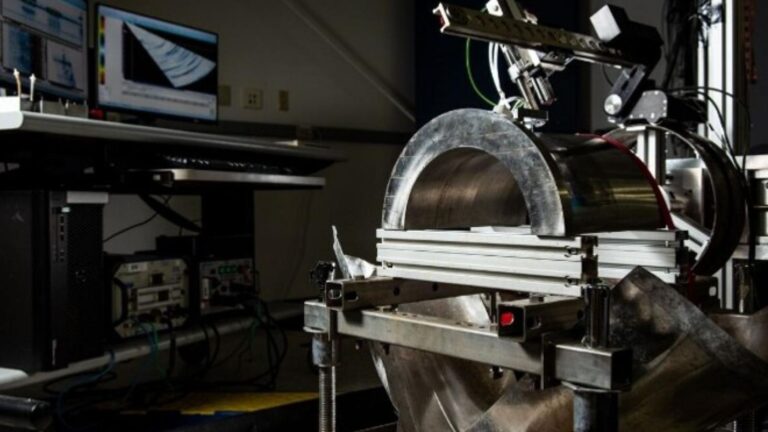
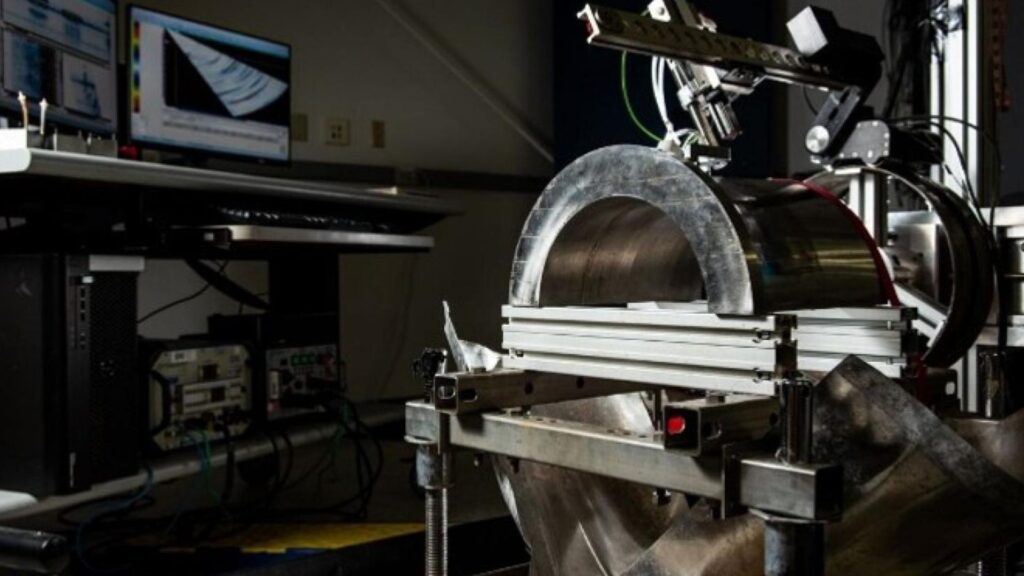
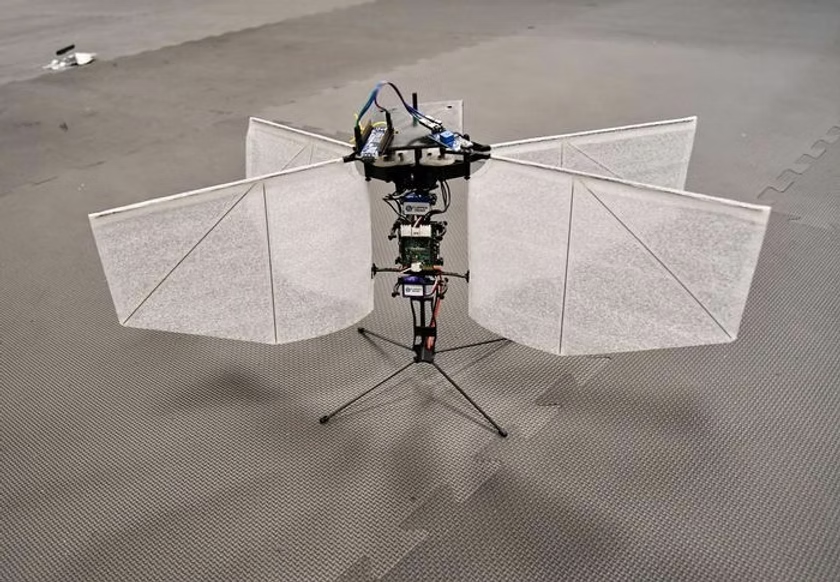
In the lab, the drone has four wings constructed from wire and fabric. Controlling it manually with a remote is a challenging task, but once its extremum-seeking system is activated, it lifts off and hovers autonomously. The system was so effective that in simulations, the drone could match the unique hovering sway of various insects, including moths, bumblebees, dragonflies, and even hummingbirds.
WATCH ALSO: https://www.modernmechanics24.com/post/lockheed-martin-new-anti-drone-system
This research opens up new possibilities for autonomous unmanned aerial vehicles (UAVs) that are smaller, cheaper, and less computationally intensive than current models. Furthermore, it provides a compelling new hypothesis for biophysicists studying how insects with minuscule brains perform such complex aerial maneuvers. If extremum-seeking is indeed the mechanism nature evolved, it could explain the incredible agility of countless flying creatures.