Have you ever watched a robot slowly navigate a cluttered room and thought, “There has to be a better way”? You’re not alone. For roboticists, one of the biggest headaches has been pathfinding—the complex math that tells a machine how to get from A to B without bumping into every chair and table in between. Classic navigation systems, while reliable, can be slow and computationally greedy, like using a supercomputer to solve a simple maze. But what if we could give robots a smarter, more intuitive sense of direction?
That’s exactly what researchers at the University of Kent have achieved with their groundbreaking algorithm, LiteRBS. The name stands for Lightweight and Rapid Bidirectional Search, and it’s designed to be the nimble, efficient navigational brain that modern robotics has been waiting for. Think of it as the difference between painstakingly checking every single turn in a maze versus having two friends start at opposite ends and efficiently meeting in the middle.
Traditional workhorses like the A* algorithm are thorough, but they don’t always scale well. In a massive warehouse or a complex environment, their processing demands can skyrocket, leaving a robot’s onboard computer struggling to keep up in real-time. Newer contenders have tried to speed things up, but they often come with trade-offs, sacrificing either speed, accuracy, or precious memory. LiteRBS elegantly sidesteps this trilemma.
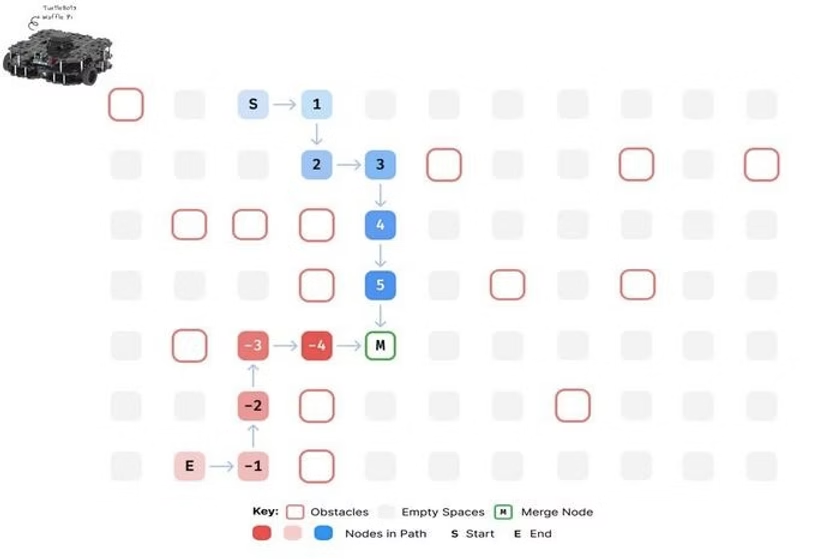
Its secret weapon is a clever form of intelligent teamwork. Instead of one search fanning out from the start point, LiteRBS launches two simultaneous searches—one from the start and one from the goal. But here’s the genius part: these two search fronts are in constant communication, dynamically adjusting their paths to pull themselves toward each other. It’s as if they have a magnetic attraction, allowing them to find the most efficient meeting point even if it’s not in the direct center, effortlessly weaving around obstacles. This dynamic convergence means the algorithm explores far fewer possibilities, saving an incredible amount of time and memory.
The numbers from their testing are staggering. After running hundreds of thousands of simulations on maps of all sizes and complexities, LiteRBS consistently outperformed its rivals. It slashed computation time by up to 98% and reduced memory usage by a massive 96%. Imagine giving your phone an update that makes maps load almost instantly while using a fraction of the battery—that’s the kind of leap we’re talking about. And it does all this while finding paths that are, over 93% of the time, within a hair’s breadth of being perfectly optimal.
WATCH ALSO: https://www.modernmechanics24.com/post/american-nextgen-ejection-seat-92-survivability
This isn’t just theoretical. The team put LiteRBS to the test on a real Turtlebot3 Waffle robot. In a world with unexpected obstacles and limited sensor data, the robot didn’t just succeed; it excelled. When a new barrier appeared, the robot recalculated a new, viable route in mere milliseconds. This proves that LiteRBS isn’t just a lab marvel—it’s a robust, practical solution for the messy, unpredictable real world. For the future of autonomous delivery robots, precision agriculture, and even search-and-rescue drones, this isn’t just an upgrade. It’s a revolution in robotic think.